Cosa è un manipolatore o braccio antropomorfo?
“E’ un sistema cinematico in grado di raggiungere i diversi punti in un volume teorico, costituito da una serie di ………
Ecco che qui già l’attenzione è calata e assolutamente abbiamo perso il contatto con quello che stavamo leggendo.
Spieghiamolo in maniera semplice:
I bracci manipolatori sono delle macchine operatrici che trasformano dei segnali elettrici in movimenti, “come la CNC?” assolutamente no, vediamo perché.
I bracci sono delle aste vincolate con delle cerniere che definiscono i gradi di libertà.
Facciamo un piccolo preambolo
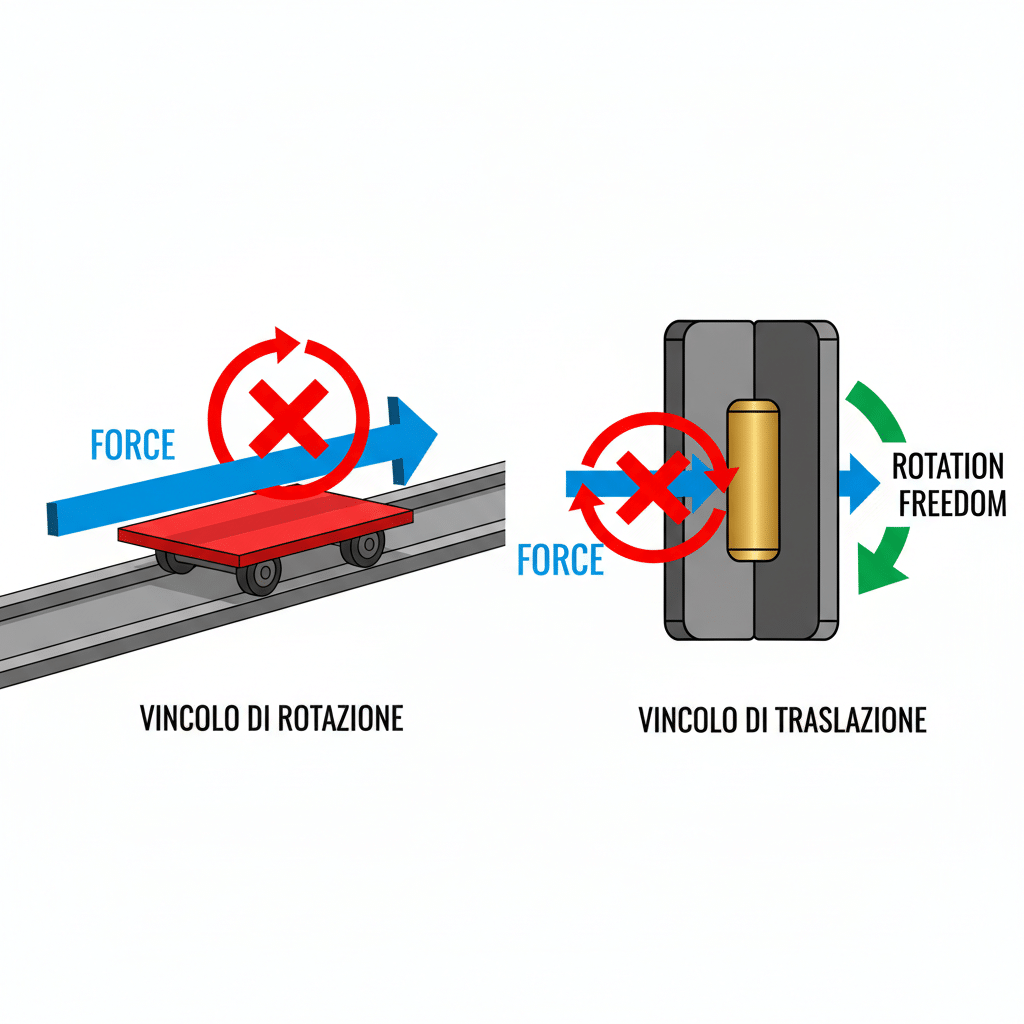
Nello spazio, ogni oggetto può muoversi liberamente quindi traslare in 3 direzioni e ruotare lungo altre 3. Per impedire alcuni di questi movimenti si utilizzano dei sistemi chiamati vincoli, e questi possono eliminare alcuni o tutti i gradi di libertà.
Ad esempio un carrello elimina il grado di libertà di rotazione, ma non quello di traslazione.
Mentre una cerniera, come si può ben immaginare, ha la possibilità di vincolare la traslazione, ma non la rotazione.
Veniamo al nostro caso specifico: un manipolatore non è altro, cinematicamente parlando, che un insieme di aste vincolate tra loro attraverso delle cerniere.
Quindi l’estremità delle aste, può raggiungere i punti dello spazio attraverso la rotazione di questi vincoli.
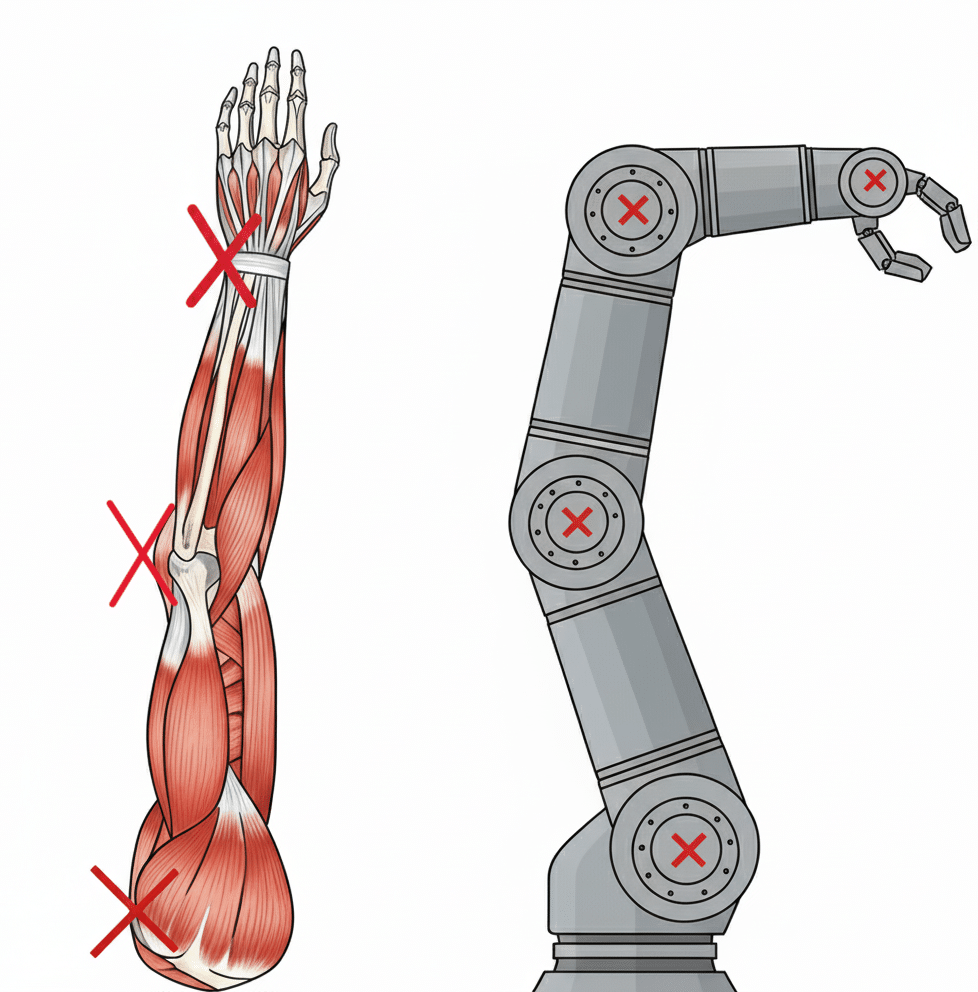
Affascinante vero? Se ci pensiamo, anche il nostro corpo trasla e si allunga poco, ma attraverso gli snodi o cerniere fa delle cose straordinarie.
Guardiamo con attenzione tutto il sistema: spalla, braccio, gomito, avambraccio, polso e mano.
2 aste (braccio e avambraccio) e 3 cerniere (spalla, gomito e polso).
Per metterli in movimento il corpo usa i muscoli ed i tendini mentre i bracci antropomorfi o manipolatori utilizzano una cinematica su ogni snodo, alcune volte diretta, cioè il motore in asse con il vincolo, altre volte attraverso un cinematismo il motore viene spostato e messo sulla parte più bassa del manipolatore.
In base al numero di motori, si definiscono il numero di assi. (I bracci ne hanno spesso 5 o 6).
E allora cosa cambia rispetto ad un pantografo CNC?
Beh, prima di tutto i punti raggiungibili dal sistema antropomorfo sono maggiori che in un pantografo poiché il sistema è molto meno vincolato ma di contro la struttura è anche molto più complessa per restare ferma ed eliminare le vibrazioni durante gli spostamenti.
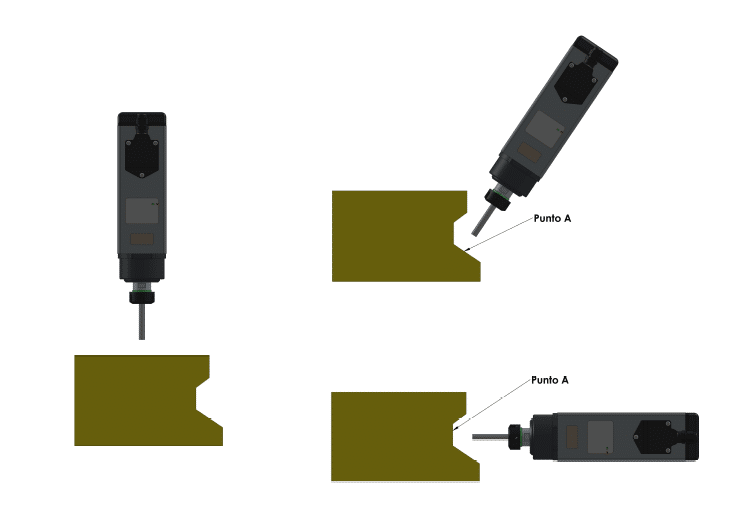
Immaginate di dover spostare una bombola, perché una bombola? Beh, perché mi è stato chiesto proprio mentre scrivevo questo articolo, IL PESO DELLA CULTURA! Qual è la differenza se la sollevo con un braccio lontano dal mio corpo, rispetto ad utilizzare due braccia mentre sono su una slitta? Forse non è proprio immediato come esempio… Allora, un pantografo o una fresatrice CNC attraverso delle guide messe su una struttura cartesiana, cioè perpendicolari tra loro e traslando su dei pattini riescono a raggiungere tutti i punti nello spazio, ma alcuni di essi restano in ombra rispetto al modello tridimensionale che vogliamo raggiungere, è proprio un limite delle strutture cartesiane. Mentre il sistema polare, cioè quello in cui ogni asta è vincolata solo su una estremità rispetto alla cerniera, garantisce di non trovarsi mai in ombra rispetto al modello tridimensionale.
Piccola precisazione: in ombra vuol dire che il punto nello spazio raggiungibile dal sistema cartesiano, rispetto al punto da cui parte l’utensile, farebbe sì che l’utensile talloni su altre parti del modello. Per questo motivo spesso i sistemi cartesiani hanno poi bisogno di sistemi rotativi per cambiare la direzione dell’utensile. Mentre in un sistema cartesiano semplice, questo non è possibile.
Allora benissimo buttiamo via tutti i sistemi cartesiani ed utilizziamo solo quelli polari!
Facile a dirsi, ma le strutture polari, proprio perché legate solo ad un estremo, vibrano di più e si ha grande difficoltà a tenerle ferme o a muovere masse grandi.
Allora che facciamo? Il nostro lavoro in LabMec è quello di scegliere il sistema migliore ed anche il più vantaggioso, sempre in base a cosa vogliamo fare.
Noi, per adesso, stiamo sviluppando 3 sistemi di bracci antropomorfi.
MANUS
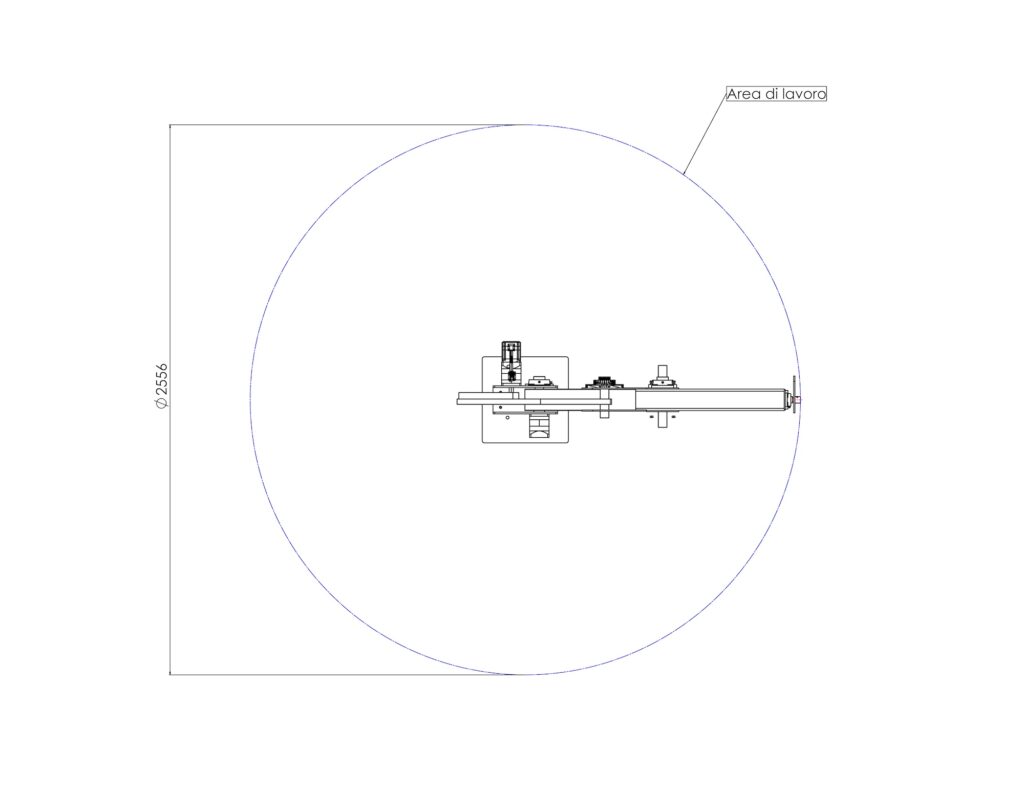
Il primo, MANUS, si riferisce ad un manipolatore con asse Z non controllato. Un sistema molto semplice in cui due aste da 450 mm sono vincolate ad un banco attraverso dei cuscinetti e la movimentazione avviene in una superficie di una circonferenza di 900 mm di diametro.
In questo sistema, al polso è montato un pistone con all’estremità una manina o una ventosa per la presa dell’oggetto.
Usato prevalentemente per spostare piccoli oggetti da una macchina ad un’altra, quindi carico e scarico di pezzi.
Il MANUS (mano in latino o allungare) può allungarsi e spostare con estrema rapidità gli oggetti presenti su un nastro trasportatore e può avere integrata una telecamera per l’acquisizione dei target da andare a colpire.
Può sollevare particolari fino ad un peso di 3kg ed essere programmato punto a punto con un banale sistema G-CODE, quindi dandogli i punti da raggiungere sul piano e quindi quando caricare e scaricare, movimentare il pezzo e a che velocità.
Il più delle volte invece si utilizza un sistema per auto-apprendimento, cioè il sistema si mette in modalità di “ascolto”, si crea la routine manualmente lui ripete tutte le volte che si vuole quel determinato ciclo.
Manus è rapidissimo e l’estrema richiesta lo ha reso un prodotto low cost ma con un controllo che non invidia assolutamente nessuno, nemmeno le case più blasonate.
Se vuoi vederlo all’opera, devi ancora aspettare qualche giorno, perché lo porteremo alla fiera Made expo di Milano.
COBRA
Il Secondo è un manipolatore a 4 assi con la possibilità di avere un carico al polso di 6 kg. Il suo nome è COBRA ma è ancora presto, è ancora in fase di sperimentazione. Prima di immetterli sul mercato questi bracci che devono collaborare con gli uomini devono avere tutta una serie di sistemi di sicurezza per evitare incidenti.
Torniamo al MANUS questa è la descrizione tecnica:
Può essere gestito in 4 modalità:
- Attraverso una pulsantiera che gli registra l’auto-apprendimento registrando anche le velocità di movimentazione.
- Attraverso il software per mettere le posizioni di arrivo e ripartenza.
- Attraverso il volantino di JOG.
- Con il visore OCULUS per simulare i movimenti o movimentarlo da remoto, in ambienti particolarmente pericolosi o lontani.
| Distanza massima raggiungibile | Diametro 1800 |
| Lunghezza degli assi | 450mm |
| Corsa Asse Z | 200mm |
| Motori | Nema 34 12 Nm |
| Riduttori | Epicicloidali rapporto 1/10 |
| Ingombro chiuso | 500×400 H500 |
| Banco con morsa | 1300*600 |
| Peso | 220 kg |
| Velocità di acquisizione | Fino a 100/secondo |
| Velocità polso | Fino a 100metri/min |
| Forza di sollevamento | 4kg |
| Strumento al polso | Ventosa o manina |
| Controllo | LabMec |
| Ripetibilità | 1mm |
| Alimentazione | 220Volts |
Innovazione, Labmec, Macchine CNC





